pg电子游戏试玩平台网站的产品中心 应用方案 技术文摘质量保证产品选型 下载中心业内动态 选型帮助 品牌介绍 产品一览 联系pg电子平台


- 矿用无人机上常用的传感器
- 来源:赛斯维传感器网 发表于 2020/7/22
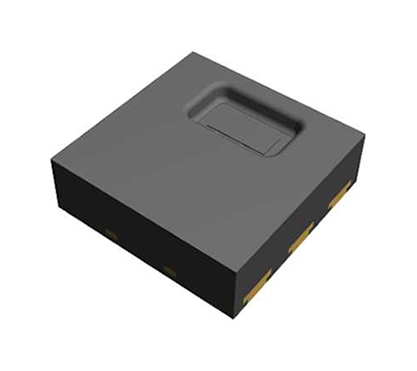
在无源和有源传感器快速的技术进步已经授权无人驾驶飞机的能力在各种类型的任务[ 117,118 ]。无人驾驶飞机上的传感器便利在厘米和空间分辨率和时间相关的分辨率图像捕获在时间[ 117,119,120,121,122]。无人机上的传感器取决于无人机的大小和任务。但是,根据航拍目的和照明条件,需要将各种传感器安装到无人机上。其中包括rgb传感器,超声波传感器,红外传感器(ir),立体相机,激光测距仪(lrf),超宽带雷达(uwb)和高光谱传感器。图4显示了采矿业无人机中常用的传感器示例。

无人机04 00034 g004 550 图4. 采矿无人机上常用传感器的示例:(a)红外传感器[ 123 ],(b)超声传感器[ 124 ],(c)rgb摄像机[ 125 ],(d)立体摄像机[ 126 ],(e)激光测距仪[ 126 ],(f)超宽带雷达(uwb)[ 127 ],(g)高光谱传感器[ 128 ],(h)磁传感器[ 129 ],(i)气体探测器[ 130 ], (j)可见和近红外光谱范围(vnir)[ 131 ]。
7.1。红外传感器
红外传感器(ir)是一种低成本的障碍物检测器传感器。红外辐射可以被ir检测到或发出。通常,所有绝对零以上的材料都会发出红外光谱的波。被认为是热传感器的红外传感器可以检测物体的能量辐射。尽管有限的分辨率,红外传感器具有检测人的能力[ 75,80,132 ]。一方面,它具有通过雾,烟,白天和黑夜进行感应的优势。但是,另一方面,它会因火焰和任何其他高温源而变形。此外,它不能很好地通过厚粉尘[工作75,132 ]。
7.2。超声波传感器(美国)
便宜且简单的特点使超声传感器可用于各种应用。这些传感器通过辐射高频声波并收集反射波来检测障碍物。可以通过考虑飞行时间技术来确定到障碍物的距离。超声波传感器是无人机技术中唯一不基于电磁波(em)的通用传感器。超声波传感器的缺点是检测吸声材料,例如布料。此外,它具有更短的范围比另一种类型的传感器[的75,76,80 ]。
7.3。红绿蓝(rgb)传感器
rgb摄像头可用于测量和地图绘制,库存量计算,道路交通监控,安全监控,检查等。rgb摄像头是一种可获取rgb(红绿蓝)图像(包括每像素深度报告)的传感系统。rgb摄像头有两个积极的音响之一[工作133,134 ]或时间飞行检测在像素[庞大的数量,创造深度评测133 ]。考虑到无人机的燃油消耗,需要仔细选择相机。通常,对于固定翼无人机来说,紧凑型相机是首选,因为重型设备无法携带[ 18 ]。
7.4。立体相机
立体相机是一种配备有两个或多个镜头以创建3d图像的相机,类似于人的视觉系统。立体相机能够通过其单独的图像传感器来显示三维图像。在清洁环境中的高分辨率和准确性是立体相机的优势。但是,由于在这种条件下光波会失真,因此它在烟雾,雾气或灰尘中的性能较差[ 80 ]。
7.5。激光测距仪(lrf)
激光测距仪(lrf)是昂贵的传感器,通常用于无人机技术中的障碍物检测。在lrf中,激光束会辐射到障碍物,并且通过接收反射波并考虑飞行时间,可以测量到物体的距离。由于lrf使用光的光波长,因此不适合雾,烟,灰尘或类似的不利条件[ 80 ]。
7.6。超宽带雷达(uwb)
超宽带雷达(uwb)的障碍物检测是通过发射无线电频谱中的电磁波来进行的。与us和lrf相似,可以通过考虑反射波和飞行时间来测量到目标的距离。但是,雷达的无线电波具有比可见光和红外线更长的波长。因此,无线电波具有比在尘埃可见光,雾,烟,以及其它不利条件[更好地渗透80,135 ]。
超宽带雷达(uwb)具有一些使其适合采矿无人机的功能。首先,它有一个更精确和更高的图像分辨率相比于像雾,烟,灰尘,雨,雪,气体恶劣的环境条件的超声波传感器,和气溶胶[ 77,80,132 ]。其次,uwb使用的低能量通常小于1瓦。这意味着雄蜂电池功率可以保存供其他实用程序[ 80,136 ]。第三,关于低频谱密度,uwb具有与像飞行控制器和遥测链路[其它无线用途最小干扰80,136]。第四,uwb可以检测不同的特征,如墙,边和角。最后,它可以识别最近物体的三维坐标[ 137 ]。
7.7。高光谱传感器
最近,轻量高光谱成像(hsi)传感器正在开发用于无人驾驶飞机上[ 138,139,140 ]。大多数多光谱成像仪(landsat,spot和avhrr)在几个由光谱段分开的宽波段上检测地球表面物质的反射率。换句话说,高光谱传感器将反射辐射评估为一系列窄且连续的波段。通常,由高光谱传感器以10至20 nm的间隔测量波段[ 141 ]。这些传感器可以提供传统方法无法访问的信息。一般情况下,这种传感器被广泛应用于地质,矿物映射,和勘探[ 140,142,143,144,145 ]。
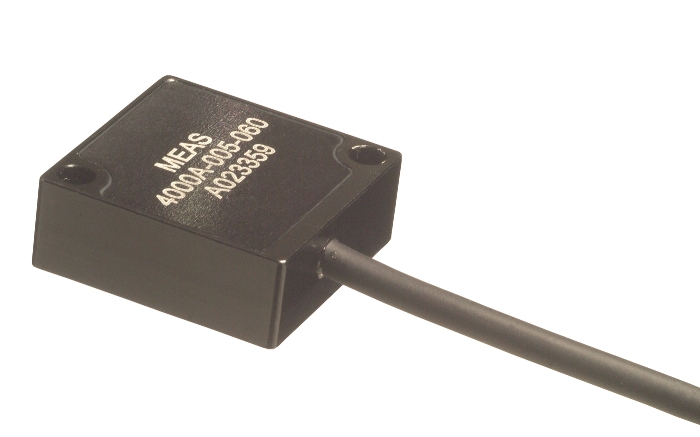
7.8。磁传感器
磁传感器可以对磁场进行精确测量。此外,磁传感器评估干扰,磁场的变化包括通量,强度和方向[ 146 ]。铯磁力计(例如scintrex cs-3s1)的正常重量约为0.82千克。应当注意,为了导出三维磁场梯度,需要四个磁力计。这意味着3.28千克将是磁传感器的总重量。这种传感器可能在矿物勘探中很有用[ 147 ]。
7.9。可见光和近红外光谱范围(vnir
具有电磁频谱的vnir传感器通常更适合安装在无人机上,因为它们体积小且重量轻。间隔约为400纳米和1400纳米(nm)的波长称为电磁光谱的可见光和近红外(vnir)部分[ 148 ]。该范围由完整的可见光谱和红外光谱的相邻部分组成,直至间隔1400和1500 nm处的吸水带[ 149 ]。另外,还有一些定义涵盖从1400 nm到2500 nm的吸水带的短波红外波段[ 149 ]。这些传感器可用于露天矿的表面湿度[ 150],尾矿坝,地下空间墙和地面。此外,每种颗粒状矿物在vnir光谱中都有特殊的特征[ 151 ],这对于配备vnir传感器的无人机在矿物勘探中具有优势。
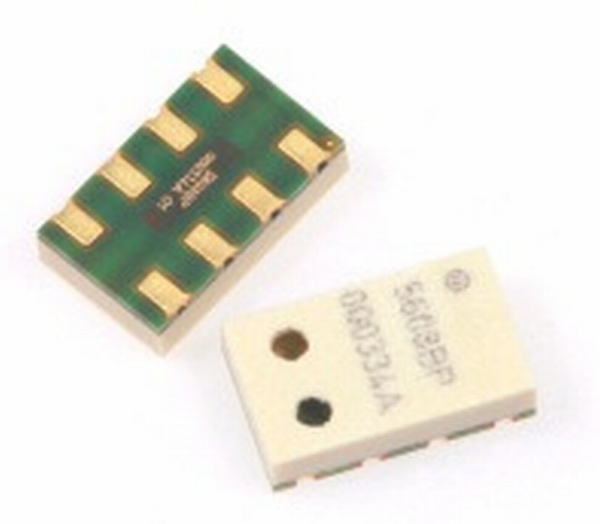
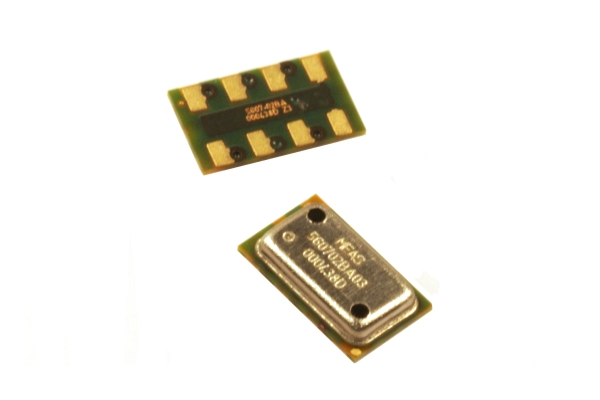
7.10。空气质量传感器
在上述传感器的顶部,可以将特定传感器(例如,空气质量,气体感测,粉尘监测等)安装在无人机上以执行特定任务。表9显示了用于空气质量测试和气体检测的传感器示例。通常,空气质量传感器基于光学,超声和电化学传感元件[ 35 ]。这些传感器可以亲自手持,安装在车辆上或从地面网络系统安装。根据污染物的类型,释放时间和测量要求,这些传感器中的许多传感器都可以安装在无人机上。例如,旋翼无人机已用于感测水蒸气和co 2,ch 4 [ 152 ],乙醇和ch4 [ 96,153 ],no 2和nh 3 [ 154,155 ],co 2 [ 154,156 ],so 2 [ 157 ]。lega等。使用多旋翼无人机以3d方式实时可视化空气污染物[ 158 ]。此外,除了热红外图像外,该平台还用于通过感测气体(包括co,c 6 h 6,no 2,o 3,so 2,nox和pm10)识别意大利海岸线沿线的污水排放[ 154,158,159 ]。目前,固定翼无人驾驶飞机可以流式传输的实时监控以及供给索引联样品[ 154,158 ]。
- 如果本文收录的图片文字侵犯了您的权益,请及时与我们联系,我们将在24内核实删除,谢谢!